
Pan and tilt systems used in today's robotics applications must move fast, smooth, and accurately. Read how an off-the-shelf motion solution maintains path to a lower cost custom solution.
Application Challenge
Pan and tilt robotics applications for security, industrial, and military applications have to move faster, smoother, and more accurately than ever before. At the same time, these systems need to be cost effective, easy to program, and easy to reconfigure. But, how do we build a high performance pan & tilt system that meets these requirements and can still be brought to market quickly?
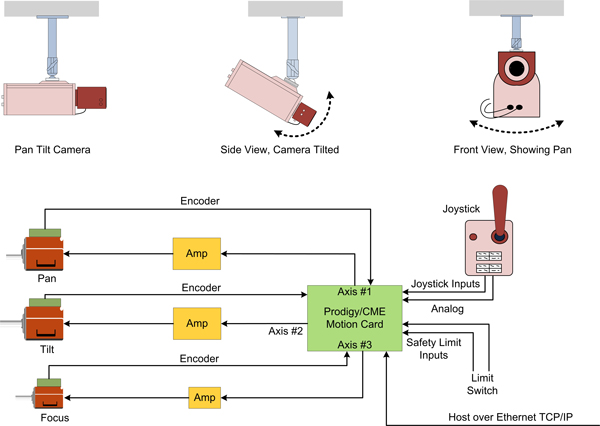
Figure 1: Pan & Tilt System Overview
Application Considerations
|
Feature/Function |
Unit/Description |
|---|---|
|
Motor type |
Low intertia slotless Brushless DC motors |
|
Motion modes |
|
|
Speed |
Worst case point-to-point slew completed in 85 mSec |
Motion Control Solution
In this application, our Prodigy/CME board is used to provide pan, tilt, and a third axis for focus control of the lens. The Prodigy card acts as a complete stand-alone machine controller, running the user’s C/C++ language application code directly on the card, and connecting to a joystick through an analog input port.
External off-the-shelf amplifiers drive the motors using +/- 10V signals from the Prodigy motion control card. Encoder feedback is input to the Prodigy board, which provides all motion control functions via a 3-axis Magellan® Positioning IC.
This pan & tilt motor controller will function in a larger Ethernet-based control platform. To accomplish this, user code is written and loaded on the Prodigy board’s CME (C-Motion® Engine) that processes Ethernet TCP/IP commands. This code receives and sends Ethernet packets via the CME’s high-level API (application programming interface) library and then directs the Magellan IC to operate the motors in the desired manner.
Safety limits for joystick operation are implemented via limit switch inputs connected to the motion control card. Various interface signals can be directly connected to other platform subsystems for safety command and data processing synchronization. Using standard Prodigy motion card functions, shutdown signals can be programmed to trigger when the servo lag exceeds a specific value or if various other motion conditions occur.
Motion speed and smoothness is optimized using PID (proportional, integral, derivative) control with feedforward and dual biquad filters in the servo pathway. Seven-segment S-curve profiles insure minimum mechanical jogging during fast point-to-point slews.
Motion optimization can be performed ‘on the bench’ using our Pro-Motion® software development and motion verification system. This facility can record and display four motion parameters per axis from an available list of more than 60 parameters at the programmed servo sample speed of 10kHz.
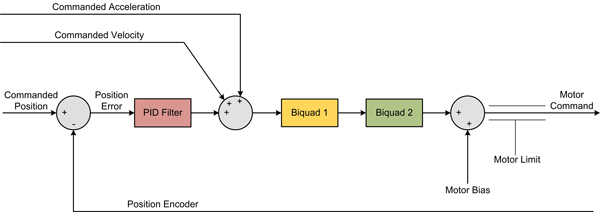
Figure 2: PID Loop
Going Further
The core of the Prodigy/CME board is the Magellan Motion Processor IC from Performance Motion Devices. The product can also be used in a user-designed motion control card. In this configuration, solderable amplifiers rather than off-board amplifiers are installed on the card, and custom connectors and hardware footprint are utilized to minimize size, improve serviceability, and dramatically lower per-unit cost.
The software and motion parameters developed with the Prodigy/CME board will function exactly the same as when loaded onto a custom Magellan-based card. This allows quick, off-the-shelf, prototyping of the mechanical hardware with a fast path to reduce the electronics cost and size for production units.
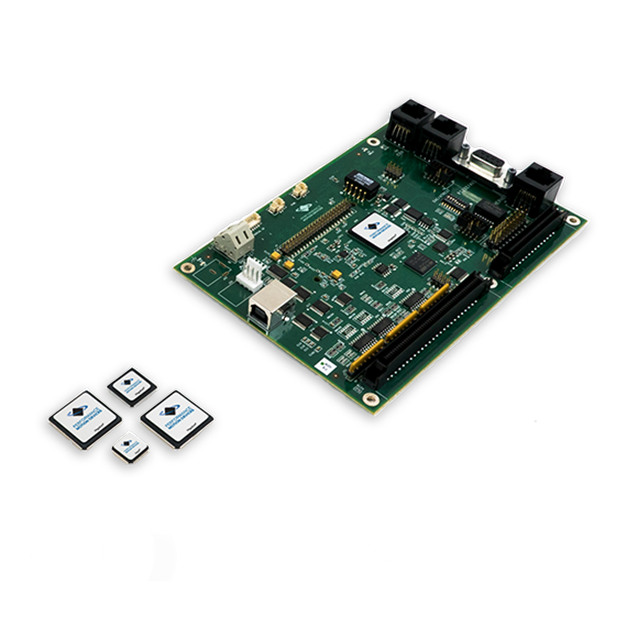
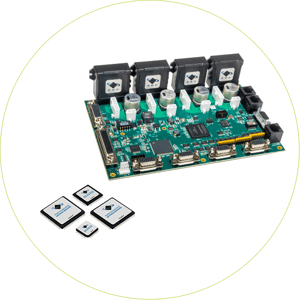 The Prodigy/CME card is based on PMD's Magellan® Motion Processor and provides high performance motion control for multiple motor types. Running user code directly on the motion card to allow off-loading of the host and complete stand-alone machine controller functionality, Prodigy/CME cards are designed for demanding and precise applications such as this pan & tilt application and other automation and instrumentation challenges.
The Prodigy/CME card is based on PMD's Magellan® Motion Processor and provides high performance motion control for multiple motor types. Running user code directly on the motion card to allow off-loading of the host and complete stand-alone machine controller functionality, Prodigy/CME cards are designed for demanding and precise applications such as this pan & tilt application and other automation and instrumentation challenges.
You may also be interested in:
- S-curve Profiles Deep Dive
- Keep Your Step Motor Position with A Closed Loop Motion Control System
- Motion Controller Design Deep Dive
Stay ahead of the competition.
If your existing equipment needs a performance boost or if you need to develop a new product in the shortest development time possible, learn about the core advantages of motion solutions from Performance Motion Devices.
- 2X faster development
- Motion solutions from ICs to turn-key boards
- Easy to implement
- Always supported
