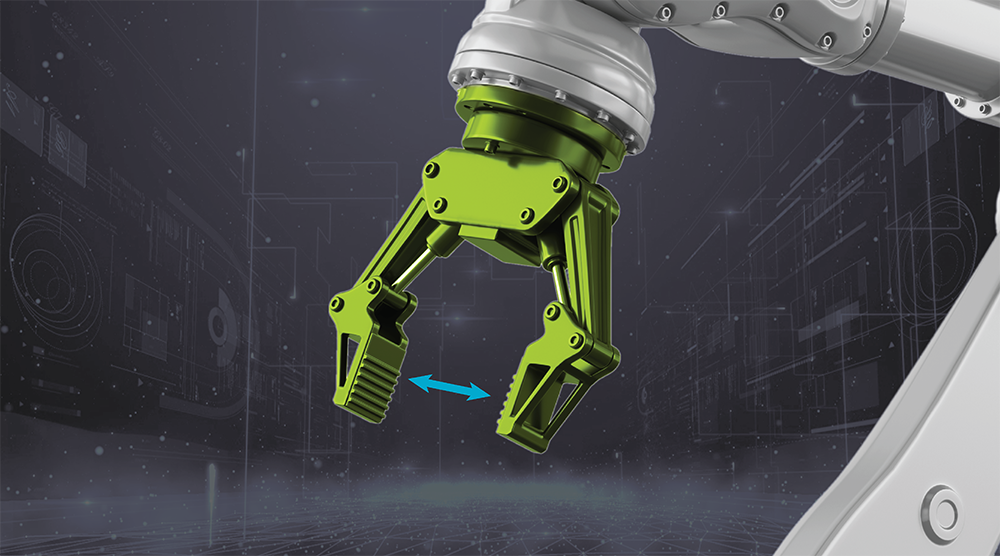
Robotic Gripper Control
Robotic Gripper Control specifically means control methods associated with getting a robotic 'hand' to grip an object safely - applying neither too much or too little force. Too much and the object may be crushed or damaged, and too little and the object may be dropped during robot arm motion. Looking at this problem more generally though this combined position and torque control problem is relevant to a broad category of applications including screw cap applicators, cobots, press fit equipment, surgical robotics, and more.