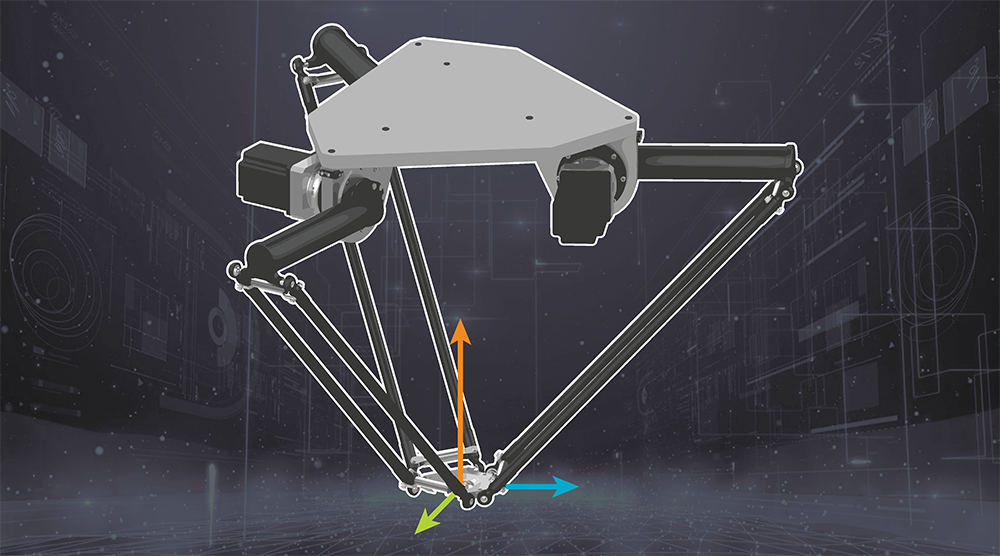
Delta Robot Control
Delta robot control means control of a three-axis ‘delta’ mechanical linkage capable of high-speed pick and place operations. Since its invention in the 1980s the delta robot has found adoption in a number of applications including food processing machinery, packaging equipment, electronics manufacturing, automated assembly equipment, dispensing machines, sorting equipment, pharmaceutical production, 3D printing and more.