Axes that operate in the vertical dimension to access or deliver carried objects typically use one of a few mechanisms to achieve this. The most common is a lead-screw, where where a rotary motor directly connects to a threaded shaft which uses a lead-screw (or ball screw) mechanism to achieve linear motion. An alternative mechanism uses a belt and pulleys to achieve linear motion from a rotating motor. In cases where faster and more accurate motion is desired, or where the system reliability and lifetime must be maximized, a direct drive linear Brushless DC motor may be used. Finally, in rare cases rack and pinion mechanisms are used to convert rotary to linear motion.
Whatever the underlying mechanism there are several key motion technologies used to maximize performance. One of the most important is S-curve profiling. A typical indexer move makes a point to point move to a commanded position destination. A key consideration is to inject as little vibrational energy as possible into the mechanism during the move. S-curve profiles, which do not have acceleration discontinuities (unlike a trapezoidal profile, which instantaneously changes acceleration) achieve this and thereby allow faster and smoother moves with less settling time.

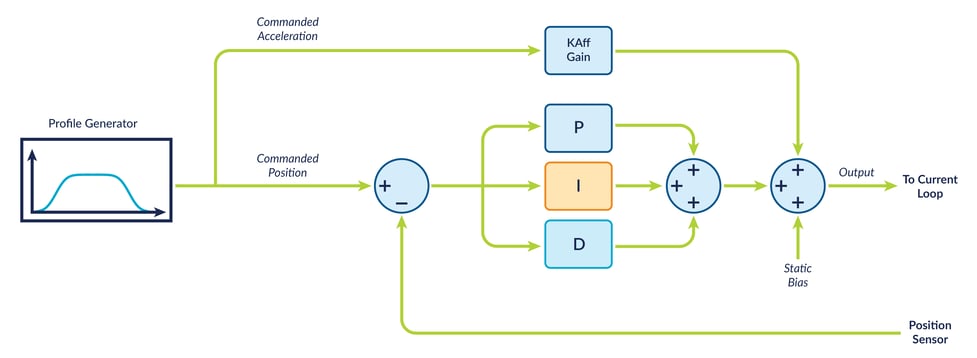
The diagram below shows the control flow for a typical single axis controller with a profile generator outputting to a position servo loop which in turn outputs to a current loop. If step motors operating in microstepping control mode are used the control diagram would only have the profile generator and the current loop. All of PMD’s Magellan-based IC, module, and board products support the motion features described in this article, and more.