The Electronic Design series “How To Control Brushless Motors” provides a structured look at how BLDC motors operate and how to control them effectively in real-world systems. Spanning five parts, the series moves from foundational concepts to more advanced control techniques, helping engineers build a complete understanding of BLDC performance and implementation.
-
Part 1: BLDC Motor Control Fundamentals introduces how brushless motors are constructed, how they generate torque, and why they are widely used in high-performance motion systems. It explains the role of electronic commutation, outlines key motor design variations, and builds intuition around magnetic field interactions and overall control architecture.
-
Part 2: Position Control Loops shifts focus to how motion is regulated through feedback. It explores how position and velocity loops work together, how system response is tuned, and why control loop design is critical for achieving stability, accuracy, and responsiveness in motion systems.
-
Part 3: Commutation Methods dives into the techniques used to drive BLDC motors, including trapezoidal and sinusoidal commutation. It highlights the tradeoffs between simplicity, efficiency, and smoothness, helping engineers understand how commutation strategy directly impacts motor performance.
-
Part 4: Current Control examines how precise current regulation enables accurate torque control. It explains how current loops function within the broader control system and why they are essential for improving efficiency, reducing heat, and achieving consistent performance under dynamic loads.
-
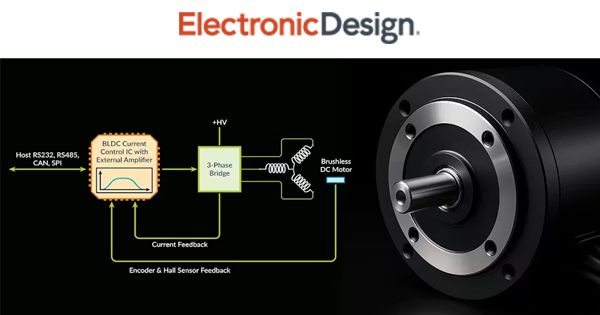
Part 5: Choosing A Motor Control IC explores control hardware selection for a BLDC system. It compares integrated and discrete architectures, explains key motor-control IC functions, and highlights important considerations such as current sensing, communications, protection features, and processing capability. The article helps engineers understand how hardware selection impacts system performance, integration complexity, and overall design flexibility.
Together, these articles provide a clear progression from basic motor operation to advanced control strategies, giving engineers the knowledge needed to design and optimize high-performance BLDC systems.
PMD Products That Provide Brushless Motor Control
Performance Motion Devices has been producing motion control ICs that provide advanced position, velocity, and torque control of BLDC motors for more than twenty-five years. Since that time, we have incorporated these ICs into a variety of brushless motor drives and motion control boards. All of these products utilize C-Motion, PMD's easy to use motion software library.
MC73112 Brushless Motor Torque Control IC
The MC73112 and MC73112N single axis control ICs are members of PMD’s Juno family of ICs and are a perfect solution for low cost, high performance BLDC motor control. The MC73112 provides advanced features such as Field Oriented Control, high/low PWM bridge control signals, leg current sensing, and more. Available in packages as small as 7mm x 7mm and costing $12 in quantity, these ICs are an ideal solution for your next machine design project using brushless motors.
Learn more >>
MC73113 Brushless Motor Velocity Control IC
The MC74113 and MC74113N are members of the Juno family of ICs and are perfect for building low cost, high performance stepper motor controllers. Juno ICs feature advanced two-phase waveform generation, high/low switching amplifier control signals, leg current sensing, and more. Available in packages as small as 7mm x 7mm and costing $12 in quantity, these ICs are an ideal solution to upgrade your existing pulse & direction controller for microstepping or closed loop stepper operation, or for starting your next machine design project from scratch.
Learn more >>

MC53113 Brushless Motor Positioning Control IC
The MC53113 single axis control IC is a member of PMD’s Magellan family of ICs and is a perfect solution for low cost, high performance BLDC motor control. The MC53113 provides advanced features such as s-curve profile generation, PID position loop control with feedforward, two direct encoder channel inputs, Field Oriented Control, direct PWM bridge signals, and more. Available in a 100-pin TQFP package the MC53113 IC is an ideal solution for your next machine design project using brushless motors.
Learn more >>
Atlas Brushless Motor Amplifier
Atlas BLDC Motor Amplifiers are compact single-axis amplifiers that provide high-performance FOC current control of three-phase brushless DC motors. Atlas amplifiers are PCB-mountable modules measuring as small as 27 x 27 x 14mm, come in both a vertical and horizontal mounting configuration and are available in three power ranges: 75W, 250W, and 500W.
Learn more >>

ION/CME N-Series Brushless Motor Drive
N-Series ION Drives are ultra-compact single-axis PCB-mountable brushless motor drives that provide S-curve point to point profiling, quadrature, sin/cos, and BiSS-C encoder input, downloadable user code, general purpose digital and analog I/O, advanced PID position loop control, and much more. They support Ethernet, RS232, RS485, CAN FD, and SPI (Serial Peripheral Interface) communications. N-Series ION Drives measure just 37 x 37 x 17mm and are available in three power ranges: 75W, 350W, and 1,000W.
Learn more >>

ION 500/3000 Brushless Motor Drive
ION 500 and ION 3000 Series Drives are compact single-axis cable-connected brushless motor drives that provide S-curve point to point profiling, quadrature encoder input, downloadable user code, general purpose digital and analog I/O, advanced PID position loop control, and much more. They support Ethernet, RS232, RS485, and CANbus communications. ION 500 drives provide 500W with 12-56V DC supply input and ION 3000 Drives provide 3,000W with 20-190V DC supply input.
Learn more >>